Main Battery Gunfire Control System Controller (part 4)
Once I had the mechanisms built to provide desired motion for the 16-inch turrets and Mk38 directors, I needed something to control them. The requirements I established for this
subsystem include:
- be reasonably priced and small in size
- capable of operating from power already available in the model
- contain the hardware necessary to control position systems, relays, lighting, etc.
- must be programmable without exotic hardware requirements.
After I set out to learn what was on the market I quickly became aware of the Arduino line of products. These are basically economical circuit boards designed to support a range of Atmel
microcontrollers and make their I/O pins easily available to the user. The company provides a development environment as well as a plug-in for my old favorite, Microsoft Visual Studio.
The products are available at numerous outlets including Amazon: I purchased an Uno starter kit to familiarize myself with the system.
I realize that even though I describe these products as "simple" and "easy to use," I understand that they are likely perceived as beyond the scope of non-nerd/geek/engineer types. Since
I AM one of those nerd/geek/engineer types with a large amount of experience in a broad range of microcontrollers and DSPs, I was off to the races very quickly.
Conceptually, this system acts as a "buffer" and sits between the Futaba receiver and the functions built into the ship, whether they be turret controls, lighting/sound effects, etc.
This buffer may be programmed to perform functions autonomously, or based on commands sent from the transmitter. By selecting the appropriate hardware and understanding how to program it,
the sky quickly becomes the limit as to what is possible.
I would encourage anyone who thinks they might have a use for computer automation in a model to at least purchase a small starter kit (less than $100), read through the easy-to-understand
documents, and give it a try. You may find you actually enjoy it!
At any rate, as of 29MAY16 I have a system running on the UNO hardware which is able to set the Mk38 director to a random bearing, then command the turret(s) to the same bearing at a random
elevation. Next I'll add hooks to decode specific sequences from the transmitter to enable control of the system from shore. Below is a photo of the UNO board (on the right) attached to
an included "breadboard." I've been using this one for intial work. The breadboard will be replaced by hard-wiring once everything is up and running. On the left is a more advanced
Arduino "mega" board: it has more memory, more features, etc. They can both be run directly off a 6VDC source, and are programmed via a simple USB connection to the PC.
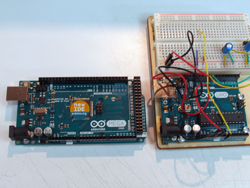 |
Arduino UNO on the right, and MEGA2560 on the left. The wiring shown is simply to bring power, ground, and the PWM control signals out to the servos.
The UNO can control up to six PWM signals to servos, while the MEGA increases this to 15. |
|
|
| |
|
|
|