16" Turret and Mk38 GFCS Director Animation - Introduction
29MAY16 - First let me say this portion of the project has been a lot of fun: it involved basic mechanical and electrical design, along with some
microcontroller coding thrown in for good measure. But let me back up a bit and define this task...
Prior to ever starting the actual build of this model, I've always assumed I would include as much animation as practical - and maybe even some impractical
features "just for the fun of it." The first and most obvious feature to receive animation effects is the 16-inch gun turret. This means creating a mechanism
to rotate ("train") the gunhouse clockwise/counter-clockwise and elevate/depress the barrels. Requirements I established for this effort include:
- realistic motion: the prototype turret trained at a rate of 4-degrees per second, and the guns elevated at 12-degrees per second,
- must be fully-programmable, providing operation without (or minimal) intervention from the R/C transmitter,
- operation must be realistic in terms of director/turret relationship,
- completely modular: the entire assembly must be self-contained and easily removable from the model for servicing/adjustment,
- must be able to disassemble to a reasonable level for repair/adjustment
- should preferably use off-the-shelf components, and
- must be externally indiscernible.
The "primary gun system" as I call it comprises the three 16-inch three-gun turrets, and the two Mk38 Gunfire Control System directors. Conceptually, while the
model is underway, the directors will independently train to a random angle. Occasionally, the turrets under control of the given director will train to the same angle,
simulating a gunfire exercise on a target designated by the director. I will probably also program in the ability to control a director directly from the Futaba transmitter.
The forward director ("Sky One") will control turrets One and Two while Sky Two will control the aft turret Three.
My first step - as usual - was to begin creating a virtual mockup in Solidworks. This inevitably led to my learning about suitable products available for
purchase. I broke the components down into three categories:
- motors
- driveline, and
- electronics.
For the motors, I wanted to use standard Futaba servos (I'm using a 14SG radio for this model). I had no idea of what to use for the driveline, but anticipated a
challenge given the required (slow) rotational speeds I would need. For the electronic control components, I knew I didn't want to design my own circuit board ($$$).
Fortunately I became aware of the Arduino line of boards and must say I am very impressed with their quality and ease of use: if I'd had something like this when in school
I'd have finished a few labs in days rather than weeks.
So... I began modeling components and (re)learning about gearing. For the turret, I ultimately wound up with two major subsections: the gunhouse would house the barrel
elevation mechanism, and the barbette would house the training works. One concession I made early on was giving up on the notion of having independently-controllable
barrels: on the prototype, each of the three guns in a turret are independent of the other two: they may be loaded, fired, and (most importantly) elevated independently.
However, given that I wanted to retain realistic motion (ie., proper speed and smooth operation), I decided to treat the three barrels as a single unit. I may revisit
this strategy at a later date.
Three renderings of the final turret mechanism appear below: click on any thumbnail to view a larger image.
 |
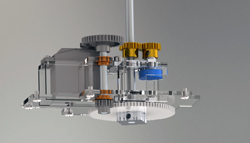
Here's the Solidworks model of the turret control system: training in the barbette and elevation in the gunhouse. |
 |
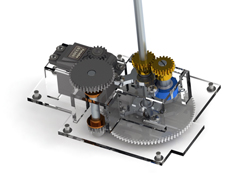
Another view of the SWx model with the barbette omitted. |
| |
|
|
|
 |
This is an exploded view showing the two main subassemblies. |
|
|
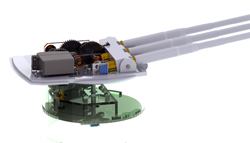
Next up was the director module. Ironically, even though the director only requires training motion, it proved to be more challenging to design from a
packaging perspective. I wanted the mechanism to sit as low as possible and be removable as a unit. Given that the superstructure is already built, whatever
I came up with would have to be "cut in" to the existing structure. I settled on the design shown in the renderings below. See Part n for more details on
why and how I arrived at this design.
 |
Low-angle view of the forward Mk38 director mechanism. |
 |
Top view... |
| |
|
|
|
 |
This render shows the forward director mechanism mounted in the superstructure. |
|
|